Prompt Collections
Master the art of industrial design generation with our curated gallery
Featured Concepts

Industrial Automation Machine
Design a fully detailed industrial automation machine used for inserting or asse...
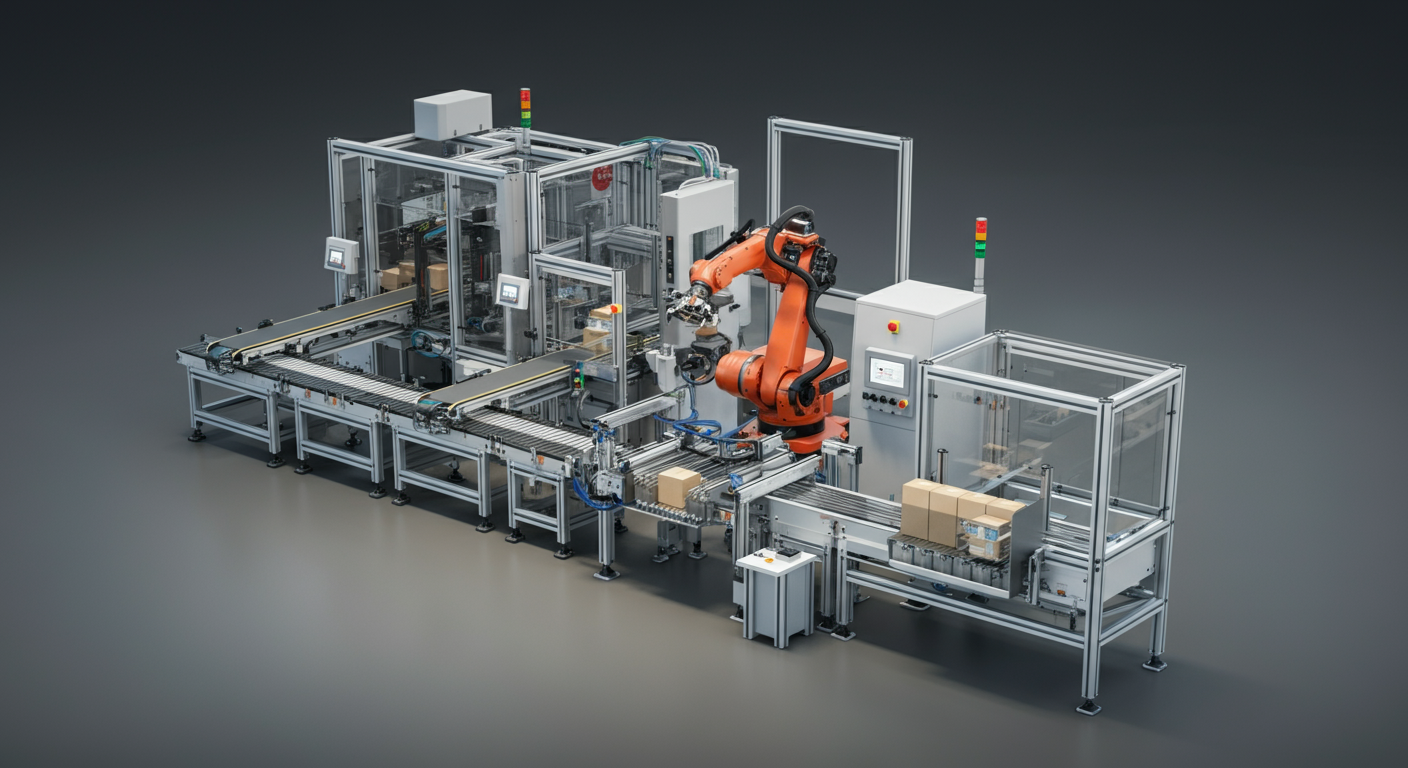
Logistics Automation Cell
Design a compact logistics automation cell within a 5m x 5m area using a small 6...
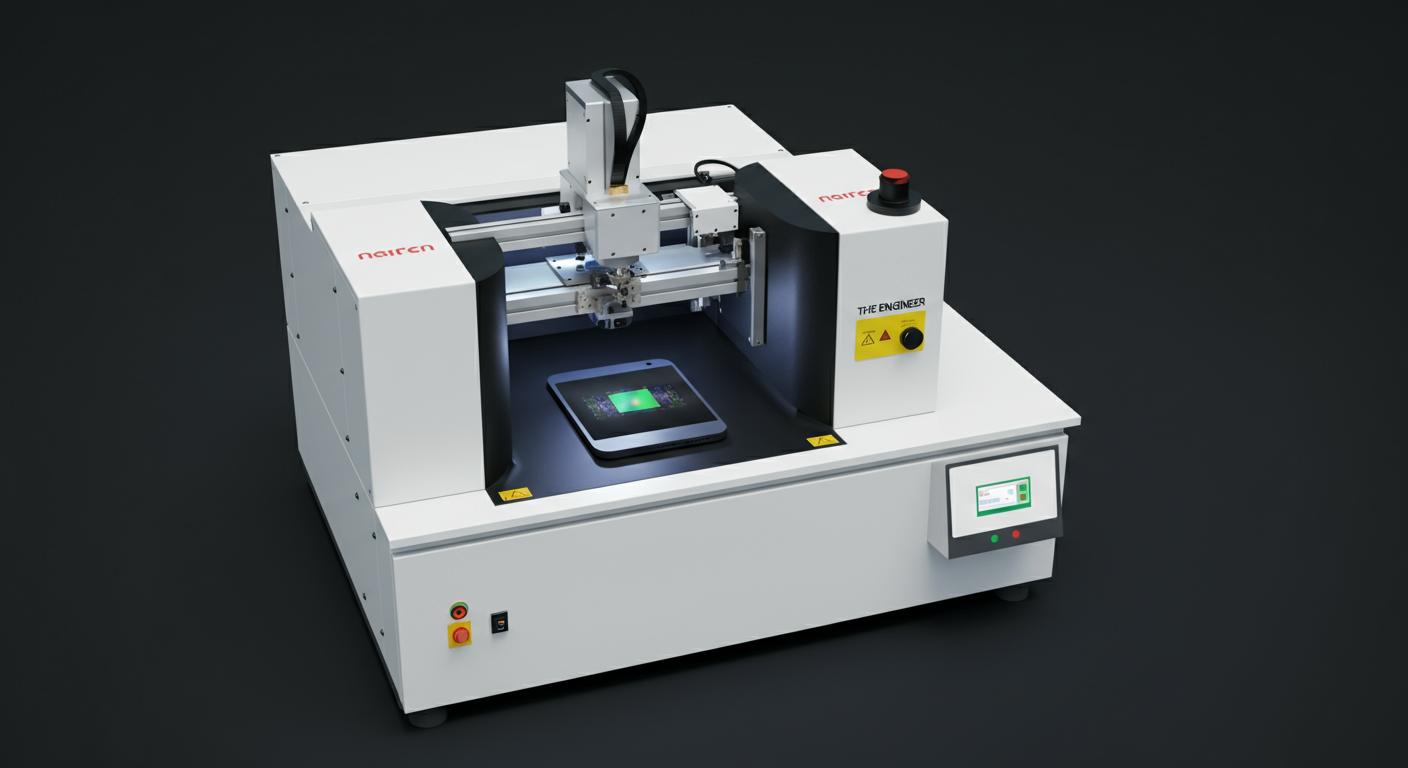
Vision Inspection Machine
Design a compact vision inspection machine specifically for smartphone display p...

Industrial Capping Machine
Design a compact 2-meter-long industrial capping machine for small-scale product...
Loading reference image...
Reference image unavailable
![Reference image]()